Ce tutoriel est une traduction en français compréhensible de ce tutoriel en anglais. Vu la longueur du tutoriel original, j’ai décidé de découper chaque étape en article et je prendrai mon temps pour tous les traduire pour qu’ils soient le plus compréhensible possible. Si vous n’avez pas envie d’attendre vous pouvez suivre le tutoriel original. Mais déjà depuis cette première étape vous pouvez comprendre le fonctionnement de rSkin.
Cette peau textile est conçu pour s’étendre sur une branche robotique afin de détecter l’intensité de la pression ainsi que la localisation de contact à travers sa surface entière. rSkin a été commandé par Ian Danforth, qui a également contribué au financement du Bilibot, une plate-forme robotique à prix abordable. Le but de ce projet était de développer une peau robotique à un prix abordable et open source qui pourrait être personnalisée pour s’adapter à une variété de formes et de tailles.
La prochaine étape de ce tutoriel explique le fonctionnement de base de rSkin sans entrer dans tous les détails requis pour le construire vous-même. Je vous conseille de lire tout le tutoriel pour avoir une idée globale avant de vous y lancer. Fabriquer rSkin n’est pas nécessairement un processus linéaire où tout doit se passer dans un ordre particulier, mais dans ce tutoriel on ira méthodiquement pour une bonne compréhension.
Liens de rSkin :
Voici quelques vidéos des résultats de la version actuelle de rSkin :
Visualisation Ellipse
Visualisation de la sensibilité par chaleur
Visualisation par échelle de gris
Étape 1 : Matrice de capteurs de pression (un aperçu)
rSkin est une grille sensible à la pression faite de tissus conducteurs, non-conductrices et piézorésistif. Alors que la grille décrite dans le présent tutoriel est grand de 28 lignes x 28 colonnes, mais il peut être étendu pour couvrir des zones beaucoup plus importantes.
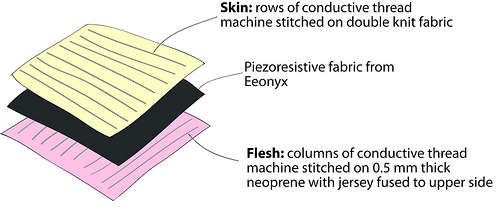
rSkin est constitué de matériaux extensibles de manière à pouvoir s’ajuster parfaitement sur le bras du robot. Les rangées et les colonnes conductrices sont cousus à l’aide d’un fil conducteur sur des pièces adjacentes de matériaux non conducteurs extensibles (à base de substrats). Le tissu extensible piézorésistif est pris en sandwich entre les lignes et des colonnes conductrices et agit comme une couche sensible à la pression. Regarder les images ci-dessus pour mieux comprendre. Les matériaux piézorésistif ont la propriété que leur résistance électrique diminue sous contrainte mécanique, comme la pression.
La photo ci-dessus montre les lignes conductrices et des colonnes faites de bandes de tissu cousues à leurs conducteurs à base de substrats avec un fil ordinaire (non-conducteur). Cette photo a été prise au cours de la phase de prototypage et si elle montre bien la superposition de la peau (la couche blanche est retourné pour faire face à la couche rose). Dans la version finale nous avons cousu les lignes conductrices et les colonnes avec du fil conducteur plutôt que d’utiliser des bandes de tissu conducteur. Nous avons utilisé le fil au lieu du tissu pour minimiser la surface conductrice (un brin de fil est plus mince que d’une bande de tissu). Ainsi nous avons augmenté le degré de sensibilité à la pression à travers le tissu piézorésistif.
Une fois la pièce de tissu de la matrice construite, les rangées et les colonnes sont reliées individuellement à des sorties ou à un micro-contrôleur qui agit comme un convertisseur analogique-numérique. Étant donné qu’il y a plus rangées et de colonnes que la plupart des pâtes des micro-contrôleurs, nous utilisons des multiplexeurs pour augmenter le nombre de connexions d’entrées/sorties. Maintenant nous mettons sous tension les lignes une par une, tandis que la lecture des valeurs analogiques (les informations de pression) se font avec les colonnes une par une. Vu que nous connaissons la ligne sous tension et la colonne lue, nous savons où (les informations de localisation) la valeur analogique entrante se situe. Tout cela se passe très vite afin que nous puissions analyser l’ensemble du réseau en plusieurs fois en moins d’une seconde et ainsi nous donnant l’ impression que tout se passe instantanément.
Le micro-contrôleur (dans notre cas un Teensy) est programmé pour analyser les lignes et les colonnes et de recueillir les données de pression et de position, de l’envoyer via la connexion USB à l’ordinateur sur lequel une autre application (utilisée pour le traitement), lit la chaîne de données et le traduit sous forme de visualisation en mappant les valeurs entrantes à leur position correspondante sur la peau de robot et l’ombrage, la coloration ou le dessin des formes pour représenter l’information de pression.
la solution utilisant les lignes et colonnes n’est pas la seule possibilité que nous avons exploré dans l’approche de ce projet. Le touchpad piézorésistif a été utilisé dans nos premiers essais, mais il ne supporte pas le multi-touch.
L’étape 2 présente les outils et matériaux utilisés dans rSkin ->>>>>
27,99 € (as of 1 avril 2025 23:56 GMT +00:00 – Plus d’infosProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
5,99 € (as of 30 mars 2025 11:01 GMT +00:00 – Plus d’infosProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
iOS 19 sur iPhone 14 Pro Max : Le prochain grand virage d’Apple entre refonte…
Comment restaurer votre PC sous Windows 11 s'il ne démarre plus Un guide complet pour…
De nos jours, les chatbots à intelligence artificielle (IA) sont devenus de véritables compagnons de…
{kind=link}
{kind=link}
{kind=link}